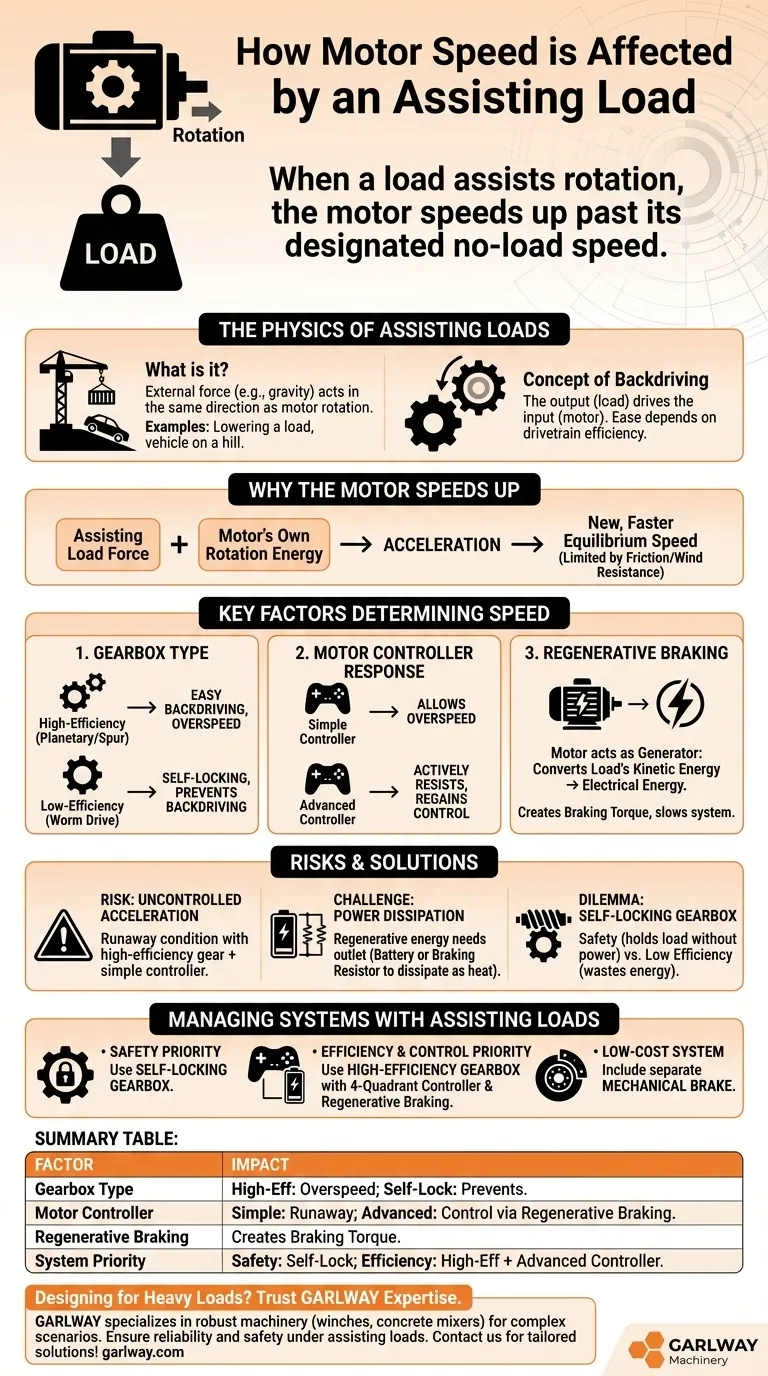
부하가 모터의 회전을 보조할 때, 모터는 속도가 빨라지며 종종 지정된 무부하 속도보다 더 빠르게 회전합니다. 이 가속의 정도는 시스템의 기계적 특성, 특히 부하가 기어박스를 통해 모터를 얼마나 쉽게 "역구동"할 수 있는지에 따라 결정됩니다.
보조 부하 또는 "오버홀링" 부하는 시스템에 자체 에너지를 추가하여 모터가 가속되도록 강제합니다. 최종 속도는 이 외부 힘과 시스템이 이를 저항하는 능력 사이의 균형을 맞추는 과정이 되며, 이는 주로 기어박스 설계와 모터 컨트롤러의 응답에 의해 결정됩니다.
보조 부하의 물리
모터 속도를 제대로 제어하려면 부하가 움직임을 저항하는 것이 아니라 돕는 상황에서 작용하는 힘을 먼저 이해해야 합니다.
보조 부하란 무엇인가?
오버홀링 부하라고도 하는 보조 부하는 모터의 의도된 회전 방향과 동일한 방향으로 작용하는 모든 외부 힘입니다.
일반적인 예로는 무거운 물체를 내리는 크레인의 중력이나 가파른 언덕을 내려가는 차량이 있습니다. 이러한 경우 모터의 작업은 부하를 구동하는 것에서 하강을 제어하는 것으로 바뀝니다.
역구동의 개념
역구동은 시스템의 출력(부하)이 입력(모터)을 구동하는 것을 의미합니다. 이는 정상 작동의 반대입니다.
장난감 자동차를 언덕 위로 밀고 가는 것을 상상해 보세요. 이것이 정상 작동입니다. 이제 그 자동차를 언덕에 세워두고 다시 내려가는 것을 제어한다고 상상해 보세요. 이것이 역구동 부하를 관리하는 것입니다. 이 과정이 얼마나 쉬운지는 구동 장치에 전적으로 달려 있습니다.
모터 속도가 빨라지는 이유
제어 메커니즘이 없으면 보조 부하의 에너지가 모터 자체의 회전과 결합되어 가속을 유발합니다.
시스템은 마찰과 공기 저항이 보조 부하의 힘과 같아질 만큼 충분한 저항을 생성하여 새로운, 더 빠른 평형 속도를 설정할 때까지 계속해서 속도가 빨라집니다.

최종 속도를 결정하는 주요 요인
실제 속도는 무한대가 아닙니다. 시스템의 여러 주요 구성 요소에 의해 제한됩니다.
기어박스의 중요한 역할
기어박스는 종종 가장 중요한 단일 요소입니다. 역구동될 수 있는 능력은 설계와 내부 마찰의 함수입니다.
스퍼 기어 또는 유성 기어와 같은 고효율 기어 유형은 매우 쉽게 역구동될 수 있습니다. 부하에 거의 저항을 제공하지 않습니다.
반대로, 저효율 기어 유형, 특히 고비율 웜 드라이브는 자가 잠금될 수 있습니다. 기어박스 내부의 마찰이 너무 높아 전원이 공급되지 않아도 기계적으로 부하가 모터를 역구동하는 것을 방지합니다.
모터 컨트롤러의 응답
간단한 전원 공급 장치는 전압을 제공하고 모터가 회전하도록 합니다. 그러나 정교한 모터 컨트롤러는 과속 조건을 감지할 수 있습니다.
컨트롤러가 모터가 명령된 속도보다 빠르게 회전하는 것을 감지하면, 움직임에 적극적으로 저항하고 속도 제어를 복구하도록 동작을 변경할 수 있습니다.
회생 제동
부하가 모터를 특정 전압에 대한 무부하 속도보다 빠르게 회전하도록 강제할 때, 모터는 본질적으로 발전기가 됩니다.
회생 제동이라고 하는 이 과정은 부하의 운동 에너지를 전기 에너지로 변환합니다. 이 발전은 부하에 직접적으로 반대되는 제동 토크를 생성하여 시스템을 늦춥니다. 고급 모터 컨트롤러는 하강 중에 속도를 정밀하게 제어하기 위해 이 원리를 사용합니다.
절충점 및 위험 이해
보조 부하를 관리하는 것은 안전, 효율성 및 비용 간의 중요한 엔지니어링 절충을 포함합니다.
제어되지 않은 가속의 위험
고효율 기어박스와 제동할 수 없는 간단한 컨트롤러를 결합하면 보조 부하가 통제 불능 상태를 유발할 수 있습니다. 이는 모터, 구동 장치 또는 페이로드 자체를 손상시키는 위험한 속도로 이어질 수 있습니다.
전력 소산의 어려움
회생 제동은 전기를 생성하며, 이 에너지는 어딘가로 가야 합니다. 배터리를 충전할 수 있지만, 배터리가 가득 찼거나 주 전원을 사용하는 경우 에너지가 갈 곳이 없습니다.
이는 모터 컨트롤러를 손상시킬 수 있는 전압 스파이크를 유발할 수 있습니다. 해결책은 이 과도한 에너지를 열로 안전하게 소산하도록 설계된 제동 저항기입니다.
자가 잠금 기어박스의 딜레마
자가 잠금 웜 드라이브는 시스템이 모든 전원을 잃어도 부하를 제자리에 유지할 수 있으므로 고유한 안전성을 제공합니다.
그러나 이러한 안전성은 매우 낮은 효율성의 대가를 치릅니다. 정상 작동 중에 동일한 내부 마찰이 상당한 양의 에너지를 열로 낭비하여 더 큰 모터와 더 많은 전력이 필요합니다.
보조 부하가 있는 시스템 관리 방법
설계 선택은 안전한 부하 유지 또는 효율적이고 제어된 움직임 중 어느 것을 우선시하는지에 따라 전적으로 달라집니다.
- 안전 및 부하 유지에 대한 주요 초점: 고비율 웜 드라이브와 같은 자가 잠금 기어박스를 사용하여 기계적으로 역구동을 방지합니다.
- 에너지 효율 및 정밀한 속도 제어에 대한 주요 초점: 4사분면 모터 컨트롤러와 고효율 기어박스를 사용하여 회생 제동을 수행하고 소산된 에너지를 관리합니다.
- 간단하고 저렴한 시스템에 대한 주요 초점: 별도의 기계식 브레이크를 포함하여 부하를 안전하게 유지하고 통제 불능 상태를 방지해야 합니다.
궁극적으로 부하가 구동 장치와 어떻게 상호 작용하는지 이해하는 것이 안전하고 효율적이며 안정적인 모션 시스템을 설계하는 열쇠입니다.
요약표:
| 요인 | 보조 부하가 있는 모터 속도에 미치는 영향 |
|---|---|
| 기어박스 유형 | 고효율 기어(예: 유성 기어)는 쉬운 역구동 및 과속을 허용합니다. 자가 잠금 기어(예: 웜 드라이브)는 이를 방지합니다. |
| 모터 컨트롤러 | 간단한 컨트롤러는 통제 불능 상태를 유발할 수 있습니다. 고급 컨트롤러는 회생 제동을 사용하여 제어를 유지할 수 있습니다. |
| 회생 제동 | 과도한 운동 에너지를 전기 에너지로 변환하여 시스템을 늦추는 제동 토크를 생성합니다. |
| 시스템 우선순위 | 안전: 자가 잠금 기어박스 사용. 효율성: 고급 컨트롤러가 있는 고효율 기어박스 사용. |
중장비에 대한 안정적인 모션 제어 시스템을 설계하고 계십니까? GARLWAY는 복잡한 부하 시나리오를 안전하고 효율적으로 처리하도록 설계된 윈치 및 콘크리트 믹서와 같은 견고한 건설 기계를 전문으로 합니다. 당사의 전문성은 귀하의 장비가 보조 부하에서 안정적으로 작동하도록 보장하여 통제 불능 상태를 방지하고 가동 시간을 극대화합니다. 특정 애플리케이션 요구 사항에 대해 논의해 보세요. 맞춤형 솔루션을 위해 지금 바로 엔지니어링 팀에 문의하세요!
시각적 가이드